

Надувной робот-змея – новый тип мягкого робота от стэнфордских ученых. Данный прототип можно причислить к разряду бионических роботов. Так как на его создание разработчиков вдохновили живыми организмами, такими как виноградная лоза, мицелий гриба и нервные клетки. Новый мягкий робот-змея может участвовать в спасательных операциях, для поиска людей под завалами. И это далеко не единственный способ его применения.

Эллисон Окамура, профессор машиностроения и один из авторов статьи в которой были описаны возможности и характеристики надувного робота, говорит, что по сути, их работа заключалась в том, чтобы понять принцип и механизм движения нового робота. Ведь способ его перемещения кардинально отличается от того, как передвигаются животные и люди. Чтобы проверить на что способен прототип провели ряд тестов в которых он должен был преодолеть разного рода препятствия. Например, перемещение к конкретной цели или самостоятельное движение. В итоге, новый тип мягкого робота способен служить широкому спектру целей, даже в сфере поисково-спасательных и медицинских устройств.
Характеристики бионического робота
Идея робота очень проста. Собой робот представляет трубку из мягкого материала сложенная внутри себя, которая способна раздуваться и расти в одном направлении. Прототип способен проползти до 72 метров, при этом его максимальная скорость 32 км/ч. Он может по своему усмотрению менять направление и перемещаться по лабиринтам.
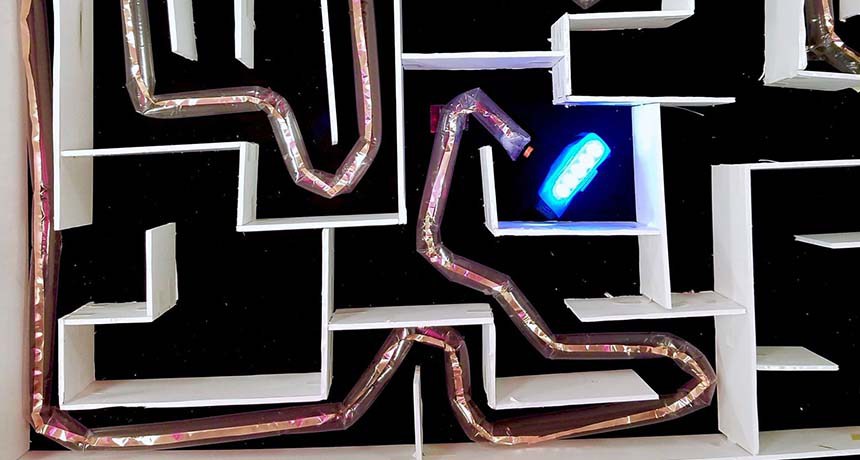
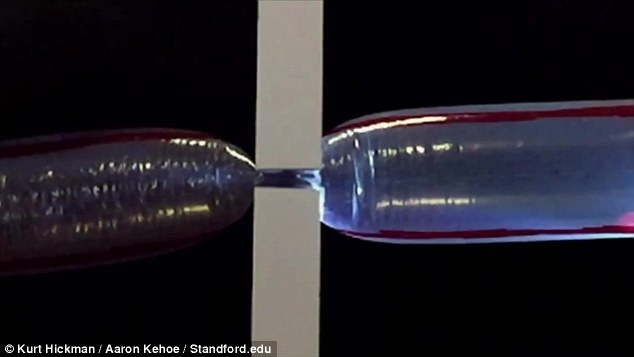
Во время тестов он рос через препятствия, полз по клейкой бумаге, проползал через клей и гвозди, и перемещаться по отвесным поверхностям. Роботу удалось проползти под 100-килограммовым ящиком и пролезть в зазор под дверью, который составлял только 10 % от его диаметра.
Более того этот бионический робот может доставлять питьевую воду людям попавшим под завал и тушить пожары.
Прототип пока не может работать полностью на автоматике. Ученым приходится вручную следить за его перемещением, которое осуществляется за счет пневматического давления воздуха. Но в перспективе стэнфордские разработчики планируют создать полностью автономного робота. А также версии которые будут отличатся по размеру и материалу, из которого они созданы.
ПОДПИСЫВАЙТЕСЬ на наш телеграм-канал и другие социальные сети.